新聞網訊 近日,我校自動化專業2019級本科生李聰同學撰寫的英文學術論文《Finite-Time Adaptive Event-Triggered Control for Robot Manipulators With Output Constraints》在線發表于電路與系統領域知名期刊《IEEE Transactions on Circuits and Systems-II: ExpressBriefs》。該期刊是IEEE電路與系統協會老牌旗艦期刊之一,為SCI源刊,主要刊登電路系統、控制系統等研究領域高質量、原創性的研究論文和評論性文章。李聰同學為論文的第一作者,指導老師和論文通訊作者均為自動化學院趙林副教授。
論文針對帶有輸出受限機器人系統提出了一種新的有限時間自適應事件觸發控制方法,將命令濾波反步控制與事件觸發控制相結合,既保留了命令濾波反步控制的計算簡便、瞬態性能好等優點,同時又通過事件觸發降低了通信與資源損耗,使關節位置跟蹤誤差在有限時間內收斂到期望的領域。為了驗證算法的優越性,論文以一個二連桿機械臂模型進行驗證,通過與不考慮輸出受限的控制方法和僅滿足指數收斂的反步方法做仿真對比發現,論文所提出的方法有著更好的收斂和穩態性能。
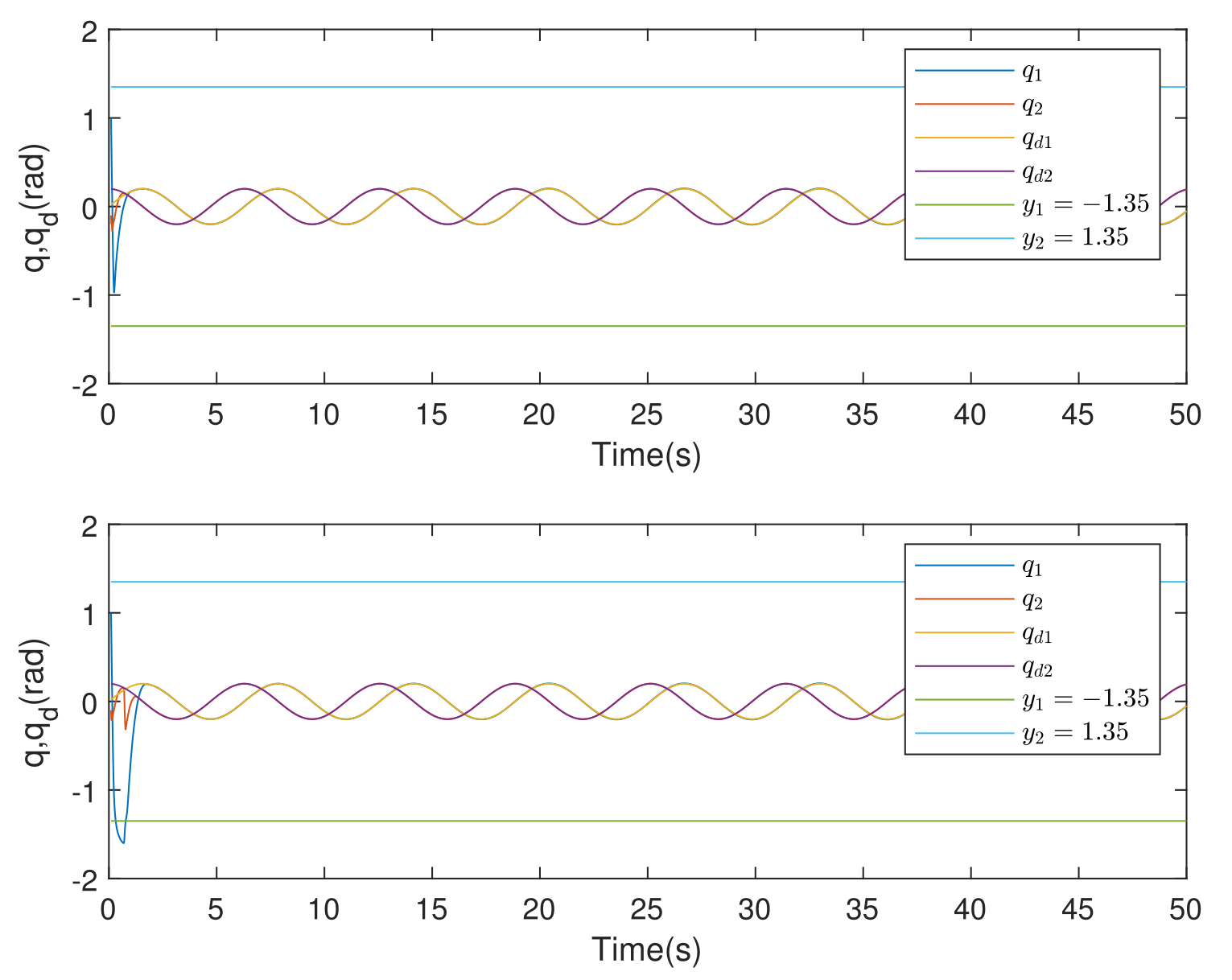
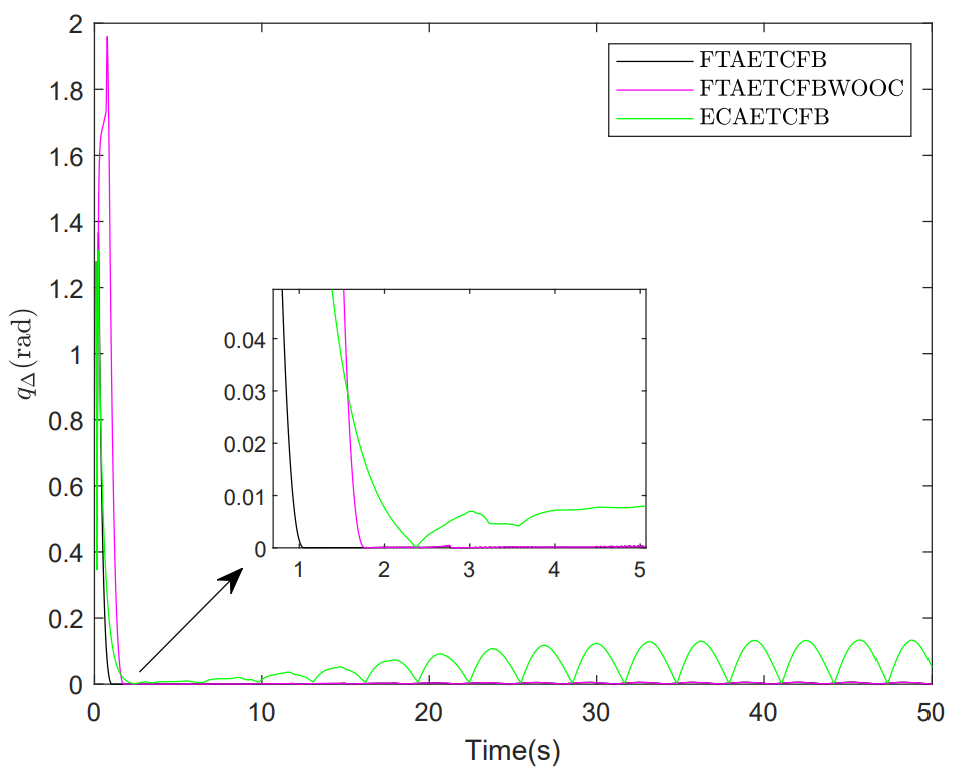
圖1 論文中FTAETCFB方法的輸出與對比誤差曲線
近年來,自動化學院致力于推進本科生和研究生科研水平,趙林副教授所在的于金鵬教授團隊,本著激發學生創造力的原則,對學生悉心指導,取得了優異的成果,指導本科生和研究生在IEEE TNNLS、IEEE TFS、IEEE TCASII等高水平期刊發表系列論文20余篇,學院本科生和研究生科研水平呈現良好的發展勢頭。





 English
English
